- Imprimer
- Partager
- Partager sur Facebook
- Partager sur LinkedIn
Recrutement
Offre de doctorat 2026-2029 - Ecole doctorale IMEP2 de Grenoble
Directeurs de thèse : G. Coupier et E. Bossy
Les écoulements à l'échelle microscopique sont intuitivement associés à la lenteur, au caractère laminaire et au contrôle par des phénomènes de dissipation. Cela rend les mécanismes de transport particulièrement inefficaces par rapport à leurs homologues à plus grande échelle, qui sont dominés par les effets inertiels. La natation en est un parfait exemple : les grands nageurs sont plus efficaces que les petits.
Cette contrainte est devenue un fardeau dans le domaine en pleine expansion de la microrobotique en milieu fluide, dont la principale application est la délivrance ciblée de médicaments, une avancée potentielle majeure pour la médecine de demain. Contrairement à l'administration conventionnelle de médicaments, elle consiste à mettre les médicaments en contact direct avec la zone malade (en particulier les tumeurs cancéreuses), augmentant ainsi l'efficacité et la sélectivité du traitement tout en diminuant les effets secondaires par la réduction de la quantité totale de médicament répandue dans l'organisme. Ces médicaments doivent être apportés par des microrobots capables de manœuvrer dans le réseau sanguin. Les propositions techniques actuelles ne proposent pas de vitesses élevées permettant aux microrobots de contrôler leur mouvement dans le flux sanguin.
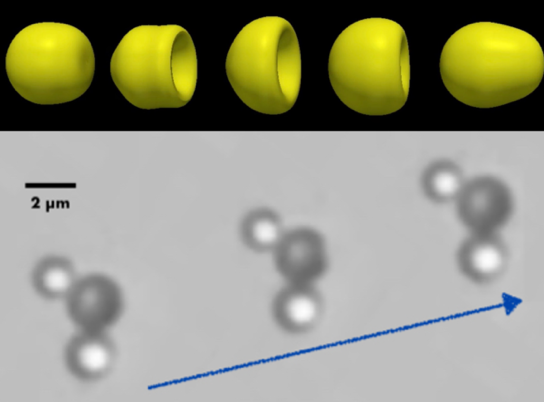
Dans ce contexte, nous proposons d'utiliser l'instabilité de flambage d'objets élastiques géométriquement simples (coquilles sphériques creuses) pour créer une propulsion. L'instabilité peut transformer l'énergie fournie par un signal ultrasonore en énergie cinétique à une cadence de plusieurs milliers de fois par seconde. Les objectifs du projet de thèse sont les suivants :
- Acquérir une compréhension fondamentale de ce mécanisme en analysant l'interaction entre le signal ultrasonore, l'hydrodynamique et la mécanique des coques.
- Développer un premier prototype de microrobot rapide et orientable contrôlé par ultrasons.
Ce projet est développé en collaboration avec les groupes de Tim Segers et Michel Versluis de l'Université de Twente, qui ont développé des méthodes bien contrôlées pour la production et la caractérisation des microcoques, et avec le groupe de S. Aland de l'Université de Freiberg, qui développera des simulations numériques de notre système.
Téléchargement
PhDOffer-UsainBOT.pdf (PDF, 254.49 Ko)
Contact
Gwennou COUPIER
Equipe MC2
gwennou.coupier univ-grenoble-alpes.fr (gwennou[dot]coupier[at]univ-grenoble-alpes[dot]fr)
univ-grenoble-alpes.fr (gwennou[dot]coupier[at]univ-grenoble-alpes[dot]fr)
www.coupier.eu
- Imprimer
- Partager
- Partager sur Facebook
- Partager sur LinkedIn