- Share
- Share on Facebook
- Share on LinkedIn
Recruitment
PhD offer 2026-2029 - Doctoral school IMEP2 of Grenoble
Supervisors : G. Coupier and E. Bossy
Flows at the microscale are intuitively associated with being slow, laminar, and controlled by dissipation mechanisms. This makes transport mechanisms particularly inefficient, compared to their inertia-driven counterparts at larger scales. Swimming is a perfect example: large swimmers are more efficient than small ones.
This constraint has become a burden in the growing field of microrobotics in fluidic environment, whose major application is targeted drug delivery, a potential major advance for future medicine. By contrast to conventional drug delivery, it consists in putting drugs in direct contact with the sick area (in particular, cancerous tumors), thereby increasing the treatment efficiency and selectivity while decreasing side effects through reduction of the total amount of drug spread in the body. These drugs are to be brought by microrobots able to maneuver inside the blood network. Actual technical propositions do not propose high velocities such that the microrobots would control their motion in the blood stream.
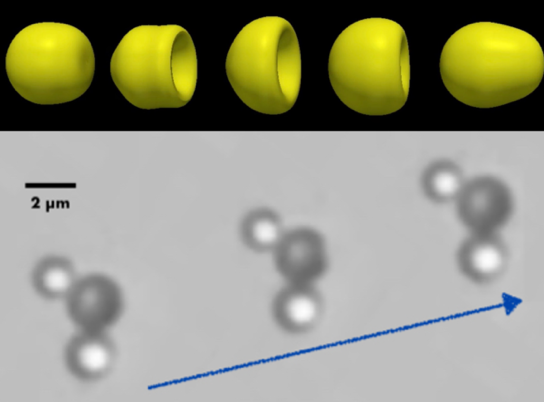
In this context, we propose to use an ultrasounddriven buckling instability of geometrically simple elastic objects (hollow spherical shells) to create propulsion. The instability can transform potential energy provided by an ultrasound signal into kinetic energy at a rate of thousands of times per second. The objectives of the thesis project are:
- To gain a fundamental understanding of this mechanism by analyzing the interaction between the forcing ultrasound signal, hydrodynamics and shell mechanics.
- To develop a first prototype of fast and steerable microrobot controlled by ultrasound.
This project is developed in collaboration with the groups of Tim Segers and Michel Versluis in Universty of Twente, who developed well controlled methods for microshell production and characterization, and with the group of S. Aland in University of Freiberg, who will develop numerical simulations of our system.
Download
PhDOffer-UsainBOT.pdf (PDF, 254.49 KB)
Contact
Gwennou COUPIER
MC2 team
gwennou.coupier univ-grenoble-alpes.fr (gwennou[dot]coupier[at]univ-grenoble-alpes[dot]fr)
univ-grenoble-alpes.fr (gwennou[dot]coupier[at]univ-grenoble-alpes[dot]fr)
www.coupier.eu
- Share
- Share on Facebook
- Share on LinkedIn