- Share
- Share on Facebook
- Share on LinkedIn
Seminar
On September 22, 2025
Franck Ruffier (Lab-STICC, Brest)
The talk will present bio-inspired vision systems for robotics, particularly utilizing early vision, such as optic flow, for aerial navigation (1). For instance, we show recently that visual models enable robots to assess and control attitude without accelerometer, explaining some insect flight capabilities (2).
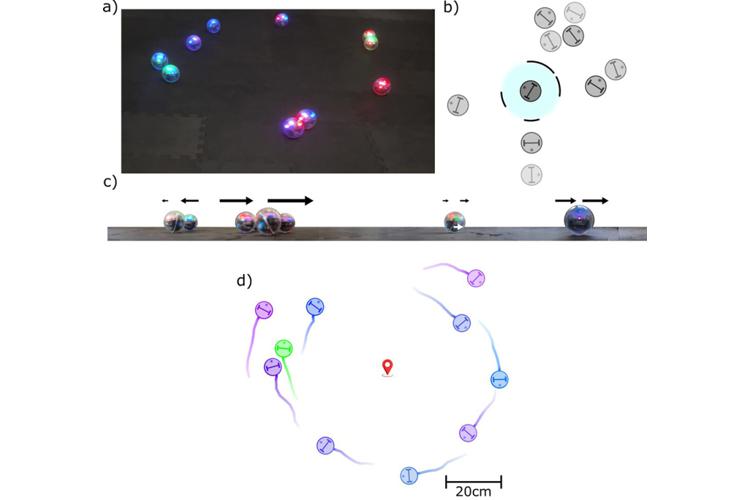
Moreover, collective motion models solely based on early vision demonstrated how spherical robots can achieve swarming and milling behaviors using panoramic visual information (3,4).
(1) J. R. Serres and F. Ruffier (2017), Optic flow-based collision-free strategies: From insects to robots, Arthropod Structure & Development, ISSN 1467-8039
(2) G.C.H.E. de Croon, J.J.G. Dupeyroux, C. De Wagter, A. Chatterjee, D.A. Olejnik, F. Ruffier (2022) Accommodating unobservability to control flight attitude with optic flow, Nature, 610, pages 485–490
(3) Castro, D., Ruffier, F., & Eloy, C. (2024). Modeling collective behaviors from optic flow and retinal cues. Physical Review Research, vol. 6, no 2, p. 023016
(4) Castro, D., Eloy, C., & Ruffier, F. (2025). Visual collective behaviors on spherical robots. Bioinspiration & Biomimetics, 31 janvier 2025
Contact: Philippe Peyla
Date
11:00
Localisation
LIPhy, salle de conférence
- Share
- Share on Facebook
- Share on LinkedIn