- Share
- Share on Facebook
- Share on LinkedIn
Séminaire
On January 16, 2023
Loïc Tadrist (Institut des Sciences du Mouvement, Aix-Marseille Univ.)
Damage of an actuator may jeopardize the functioning of a machine or a vehicle. Redundancy of actuators usually ensures critical motions. However, for some vehicles or applications, redundancy is not permitted, either because of steric hindering (e.g. for helicopters) or because of weight cost as for aeronautical and spatial applications.
To create resilient actuators, one possibility is to draw inspiration from biological actuators whose performance is preserved in the event of damage. The first part of the presentation will be dedicated to define the word “resilience” in an engineering context.
Second, we will present two biological actuators that are resilient.
- The pulvini (leaf pads allowing the reversible motion of leaves) allow, for example in mimosa pudica, to fold the leaves when they are touched. These "plant muscles" are excellent candidates for biomimicry, the challenge being to control the actuator at the cellular level. We will present a pneumatic prototype of pulvinus that allows performing motion and changing mechanical properties (young modulus, anisotropy, Poisson ratio).
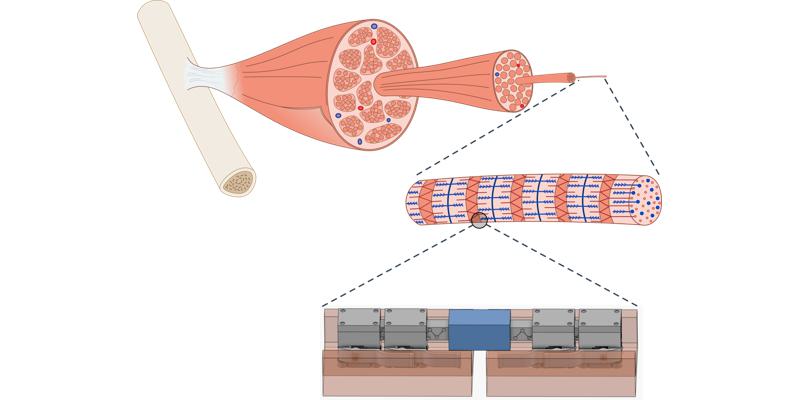
- The skeletal muscle is shown to be resilient. We investigate the origins of resilience at 3 scales on synthetic biomimetic prototypes: the sarcomere, the myofiber and the full muscle.
Date
14:00
Localisation
LIPhy, salle de conférence
- Share
- Share on Facebook
- Share on LinkedIn