- Share
- Share on Facebook
- Share on LinkedIn
Recruitment
Targeted drug delivery, i.e. the ability to deliver a precisely controlled amount of medication to a diseased cell without dispersing it to other parts of the body, has become a major challenge in the field of bioengineering, with several attempts being made to develop microrobots capable of moving through the bloodstream and administering the desired substance.
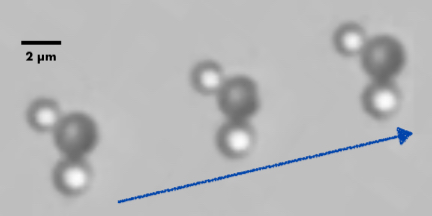
In our team, we develop such a solution based on the actuation of microbubbles by ultrasound [1]. In our Usain-BOT project, we aim at building a first prototype of microrobot able to swim in the three directions in a controlled way. To do that, we need to assemble several lipid-coated microbubbles that will then act as different propellers which will be individually activated by dedicated ultrasound signals.
In collaboration with our colleagues of the University of Twente (the Netherlands) we wish to use specific ligands between the bubble shells, and we would like to design a set-up to assemble these shells in a controlled way.
To that aim, the trained will develop a microfluidic platform that would allow for precise control of relative positions of the shells, either dynamically with well-controlled flows or statically by using traps, as proposed in [2]. The assembled shells will then be submitted to ultrasound signals to characterize their ability to swim and change direction.
The trainee will be cosupervised by a PhD student and the researchers involved in this project.
The trainee, M2 level or equivalent, should have a good knowledge of soft matter or fluid mechanics. A taste for experimentation and instrumental development, in particular in microfluidics, is highly desirable. The internship should last a minimum of four months, ideally 6 months, and may be followed by a thesis. The intern will receive a stipend of around 550 euros per month.
[1] Coated microbubbles swim via shell buckling, G. Chabouh, M. Mokbel, B. van Elburg, M. Versluis, S. Aland, C. Quilliet and G. Coupier, Comm. Eng. 2, 63 (2023)
[2] Sequential capillarity-assisted particle assembly in a microfluidic channel, R. Pioli et al., Lab on a Chip 21, 885 (2021)
Download
Stage 2026 - microswimmer.pdf (PDF, 435.1 KB)
Contact
Gwennou COUPIER
MC2 team
gwennou.coupier univ-grenoble-alpes.fr (gwennou[dot]coupier[at]univ-grenoble-alpes[dot]fr)
univ-grenoble-alpes.fr (gwennou[dot]coupier[at]univ-grenoble-alpes[dot]fr)
www.coupier.eu
- Share
- Share on Facebook
- Share on LinkedIn