- Imprimer
- Partager
- Partager sur Facebook
- Partager sur LinkedIn
Séminaire
Le 27 septembre 2024
Aida FERNÁNDEZ (LTM, CEA-Leti) // Andréa FEASSON (MC2, LIPhy)
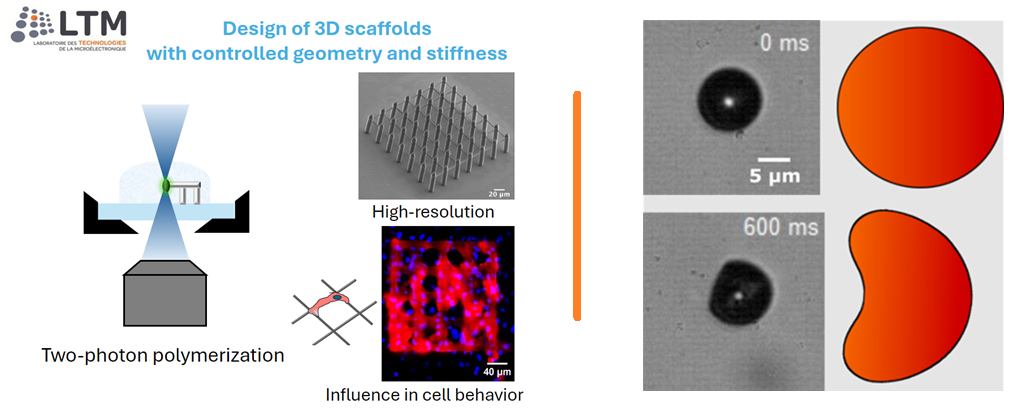
3D Scaffolds with Tunable Physical Properties for the Study of Cell Behavior
Aida FERNÁNDEZ (LTM, CEA-Leti)

Cells in the body are typically supported by a complex three-dimensional (3D) extracellular matrix (ECM). They have a complex feedback relationship in which cells can remodel the matrix, and the matrix, in turn, provides stimuli that influence cellular behavior. Since this dynamic environment is not accurately represented by the static nature of traditional 2D cell culture surfaces, data obtained from in vitro studies with these models can be non-predictive of in vivo behavior, often resulting in disparities with animal and clinical tests.
Additive manufacturing technologies, notably two-photon polymerization, combined with material technology, provide a promising path for the creation of artificial 3D scaffold models with defined mechanical and geometrical properties that better emulate intricate characteristics of the native environment of cells in vitro.
*******************************************************************************
Ultrasound Driven Micro-Robot
Andréa FEASSON (MC2, LIPhy)

Artificial microswimmers could be a way of transporting cargo through the blood vasculature for targeted drug delivery. However, most of them to date are to slow to go upstream and are advected. Passive advection of micro or nanocarriers results in only 1% of them successfully reaching a target. It is thus necessary to develop faster microswimmers to gain efficiency and selectivity. It has been demonstrated in previous studies that an ultrasound contrast agent (UCA) can swim at a speed of 1µm/s via a pressure-driven buckling instability activated at a frequency of order 1 Hz. Starting at ambient pressure with a spherical UCA, this instability will deform the UCA rapidly in a buckled state once a pressure threshold is reached. Then, if the pressure is released back to ambient pressure the UCA returns slowly to its initial spherical state. To increase the speed of the UCA, I am increasing the frequency of activation of the UCA and studying its effect on the buckling.
Date
12:00
Localisation
LIPhy, salle de conférence
- Imprimer
- Partager
- Partager sur Facebook
- Partager sur LinkedIn